Les réseaux de Pétri
INTRODUCTION
Ils furent inventés en 1964 par Carl Adam
Pétri.
Il est important de noter que les réseaux
de Pétri constituent un outil très puissant. Cependant, il n'a pas pénétré le
milieu industriel faute de normes et d'une utilisation souvent trop tournée
vers la recherche que vers l'industrie. C'est sa forme voisine, le Graphcet qui
s'est répandu dans le milieu industriel. De nos jours, l'industrie requiert des
outils de modélisation de plus en
plus puissants, et le Graphcet montre parfois ses limites.
Peut-être les réseaux de Pétri
remplaceront-ils un jour le Graphcet?
Le Graphcet est une forme voisine des
réseaux de Pétri. Nous présenterons tout d'abord ces deux outils de
modélisation, puis nous établiront une comparaison.
I)LE GRAPHCET
cf cour
II) PRESENTATION DES RESEAUX DE PETRI
a) Définitions essentielles
Une place
Une pace décrit les états du système
modélisé. C'est un rond.
C'est l'équivalent du carré dans le
Graphcet
Une transition
Elle représente les changements d'état.
C'est l'équivalent du __ au Graphcet
Un arc orienté
Ce sont les arcs orientés qui relient les
places aux transitions. A chaque arc est associé un nombre, appelé "poids
de l'arc"
Un jeton ou une marque
Ils sont placés dans les places.
Exemple récapitulatif : fig1

fig 2 :Le nombre de jeton est
inférieur au poids de l’arc. Donc la transition n’est pas franchie
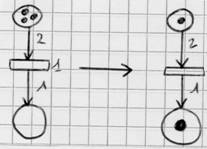
fig 3 :Le nombre de jeton est supérieur au poids de l’arc, la transition est donc franchie
b) Propriétés essentielles
Arc orienté
En général, le poids de l'arc=1, c'est un
réseau de Pétri ordinaire.
Quand le poids de l'arc différent de 1, on
parle de réseau de Pétri généralisé. On met dans la place
Sensibilisation d'une transition: quand le
nombre de jetons dans la place d'entrée est supérieur au poids de l'arc
Franchissement d'une transition
On prélève dans la place d'entrée un nombre de jetons égal au poids de l'arc
issu de la transition.
Quand la transition est sensibilisée et que
la réceptivité associée à la transition est vrai.
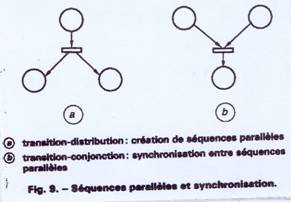
c) Parallélisme et
synchronisation
Le parallélisme et la synchronisation sont
les deux grandes caractéristiques des
systèmes séquentiels.
Synchronisation de séquences parallèles.
Quelques exemples: Il faut que lest
transitions de droite et de gauche soient sensibilisées. :
3 jetons au minimum à gauche
2 jetons au minimum à droite
c=1
Étape d’attente
Synchronise les 3 branches
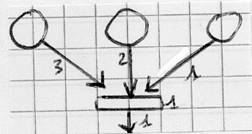
fi4 :Le 1 sur la transition signifie
que la condition associée à cette transition est toujours vraie.
Création de séquentielles parallèles
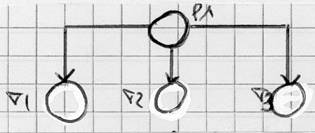
fig 5
Bilan (fig 6):
d) l'extension temporisée
On intègre au réseau de Pétri la variable
temps. Cette référence de temps se superpose au modèle autonome qui devient de
facto non autonome.
Le tout est appelé "réseau de Pétri
temporisée".
Le P-temporisé
Ce sont les places qui sont temporisées
Le T-temporisé
Ce sont les transitions qui sont
temporisées. Remarque: On montre que 1 est équivalent à 2
Le Pétri interprété
Lorsqu’il existe des réceptivités sur les
transitions
e) Quelques types de réseaux de
Pétri
Réseau de Pétri borné
Quand le nombre de jeton dans les places ne
dépasse pas un nombre k
Réseau de Pétri pseudo vivant
Si pour à tout instant il existe une
transition sensibilisée. Dans la pratique cela se traduit par une absence de
blocage.
Réseau de Pétri vivant
Si toutes les transitions peuvent être
franchies.
Réseaux de Pétri propre (réinitialiser)
Il existe un cycle tel qu’à un moment
donné, lors du fonctionnement, la configuration du réseau est la même qu'à
l'état initial.
f) L'interprétation, la
traduction mathématique.
Les réseaux de Pétri peuvent être modélisés
par des matrices.
g) Conflits
Conflit structurel
C'est quand une transition possède une
entrée commune
Conflit effectif
C'est lorsqu’un marquage sensibilise les
deux transitions
En fait, rien dans le réseau ne permet de
prévoir laquelle des transitions sera franchie.
Exemple :
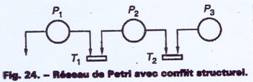
Fig 7
II Comparaison du réseau de Pétri
et du Graphcet sur un exemple
a) L’exemple : Partage de ressource
Soient
deux chariots C1 et C2 qui se déplacent indépendamment l’un de l’autre sur 2
voies distinctes.
Le bouton M1 actionne C1 s’il
est en A1
Le bouton M2 actionne C2 s’il
est en A2
Le cycle A1-B1-A1 (resp
A2-B2-C2) avec chargement A1(resp A2) et déchargement en B1 (resp B2)
Le déchargement de C1 est
prioritaire sur C2.
Soit :
CHG1 : Chargement du chariot C1
CHG2 :
Chargement du chariot C2
DCHG : Déchargement
FINCHG1 : Fin de
chargement du chariot C1
FINCHG2 : Fin du
chargement du chariot C2
FD : Fin de déchargement
 Le réseau de Pétri :
Le réseau de Pétri :
 1, B1 :
Priorité
1, B1 :
Priorité
![]() Synchronisation
Synchronisation
Le Graphcet : C1 C2
 |
|||
 |
|||
b) La Comparaison :
Outre la symbolique, la principale
différence est la gestion de la synchronisation :
Graphcet : Utilisation
de P13 et forme graphique
Pétri : Meilleure
visualisation de la synchronisation :
è liaison plus claire
è fort intérêt pour des commandes complexes
avec beaucoup de synchronisation
Cf Graphcet d’un contrôle précédent (assez
compliqué)
Par contre, la priorité de C1 sur C2 est
gérée de la même façon avec une réceptivité alliée à une transition.
On peut aussi voir qu’avant cette priorité
tous deux possèdent une étape d’attente.
On remarque aussi que (Hormis P13), les deux
graphes (Graphcet et Pétri) possèdent le même nombre d’étapes (12)
CONCLUSION
Malgré leurs spécificités propres, le
Graphcet et le Pétri sont très proches dans le traitement des commandes
séquentielles.
Néanmoins, au travers de cet exemple, nous
avons pu constater que Pétri aborde le problème avec une conception plus
schématique et graphique ; ce qui lui octroie un avantage dans la
compréhension de la commande d’autant plus quand cette dernière est complexe.
Or, de nos jours les commandes séquentielles
ont tendance à se complexifier, ce qui encourage l’utilisation de Pétri. De
plus, il existe une adaptation de Pétri : les Pétri coloriés qui
permettent d’aborder des problèmes plus complexes avec une conception encore
plus visuelle.
![]()